Aktuelles
Erfolgreiche Promotion
Raman hat an der TU Ilmenau seine Dissertation zum Thema „Biomimetic approach to design multifunctional morphing structures" erfolgreich verteidigt. Wir gratulieren ihm herzlich und wünschen ihm für seinen weiteren wissenschaftlichen und persönlichen Weg alles Gute.

Teilnahme am Bre3D Award in Bremen
Unser Kollege Raman hat am i2b meet-up „Bre3D Award“ in Bremen teilgenommen. Zahlreiche Unternehmen, Forschungseinrichtungen und Projekte haben ihre innovativen Ansätze im industriellen 3D-Druck präsentiert – von technologischen Weiterentwicklungen bis hin zu praxisnahen Anwendungen. Raman gewann faszinierende Eindrücke davon, wie weit die Technologie bereits in Bereichen wie Luftfahrt, Metalldruck, Sensorik und Transportwesen verbreitet ist.
Auch unser Ausstellungsstand zog viel Aufmerksamkeit auf sich.
 |
 |
Spannender Besuch im Robotics Lab des Fraunhofer IIS in Dresden
Kollegen unseres Lehrstuhls haben an einem spannenden Besuch im Robotics Lab des Fraunhofer IIS, Institutsteil EAS (-> Entwicklung Adaptiver Systeme) in Dresden teilgenommen. Die beiden Studentinnen Alice Truong und Carlotta Fischer studieren Medizintechnik an der Otto-von-Guericke-Universität Magdeburg - Im Rahmen ihrer Bachelorarbeit beschäftigen sie sich mit der automatisierten Parameteridentifikation serieller Roboter. Betreut werden sie dabei gemeinschaftlich vom Fraunhofer IIS und unserem Lehrstuhl für Mechatronik.
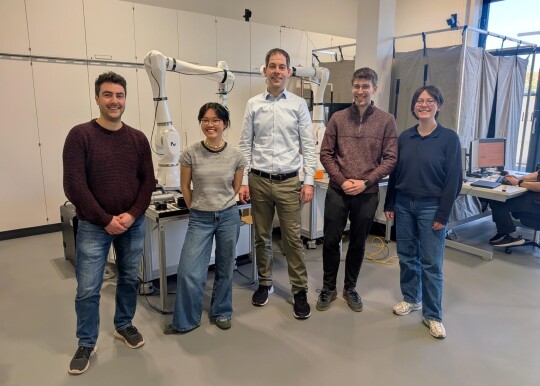
V.l.n.r.: Matthias Fenske, Alice Truong, Andreas Scholz, Konstantin Wrede, Carlotta Fischer. Virtuell teilgenommen hat außerdem Ron Martin.
Wir bedanken uns für die tolle Möglichkeit, das Robotics Lab in Dresden besuchen zu dürfen.